| ПОЗНАВАТЕЛЬНОЕ Сила воли ведет к действию, а позитивные действия формируют позитивное отношение Как определить диапазон голоса - ваш вокал Игровые автоматы с быстрым выводом Как самому избавиться от обидчивости Противоречивые взгляды на качества, присущие мужчинам Вкуснейший "Салат из свеклы с чесноком" Натюрморт и его изобразительные возможности Применение, как принимать мумие? Мумие для волос, лица, при переломах, при кровотечении и т.д. Как научиться брать на себя ответственность Зачем нужны границы в отношениях с детьми? Световозвращающие элементы на детской одежде Как победить свой возраст? Восемь уникальных способов, которые помогут достичь долголетия Классификация ожирения по ИМТ (ВОЗ) Глава 3. Завет мужчины с женщиной
Оси и плоскости тела человека - Тело человека состоит из определенных топографических частей и участков, в которых расположены органы, мышцы, сосуды, нервы и т.д.
| Модуль нормального ускорения
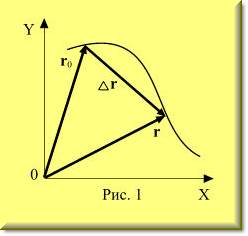
Кинематика. Основные формулы Прежде всего, следует заметить, что речь будет идти о геометрической точке, то есть области пространства, не имеющей размеров. Именно для этого абстрактного образа (модели) и справедливы все представленные ниже определения и формулы. Однако для краткости я в дальнейшем буду часто говорить о движении тела,объектаили частицы. Это я делаю только для того, чтобы Вам легче было читать. Но всегда помните, что речь идет о геометрической точке. Радиус-вектор точки - это вектор, начало которого совпадает с началом системы координат, а конец - с данной точкой. Радиус-вектор обозначается, как правило, буквой r.
Траектория - это линия, вдоль которой движется тело. Путь - это сумма длин всех участков траектории, последовательно проходимых телом при движения. Обозначается либо ΔS, если речь идет об участке траектории, либо S, если речь идет о всей траектории наблюдаемого движения. Иногда (редко) путь обозначают и другой буквой, например, L (только не обозначайте его как r). Запомните! Путь - это положительный скаляр! Путь в процессе движения может только увеличиваться. Средняя скорость перемещения vср - это вектор, определяемый выражением vср = Δr/Δt. Мгновенная скорость перемещения v- это вектор, определяемый выражением v = dr/dt. Средняя скорость путиvср - это скаляр, определяемый выражением vср = Δs/Δt. Часто встречаются и другие обозначения, например, <v>. Мгновенная скорость пути v - это скаляр, определяемый выражением v = ds/dt. Модуль мгновенной скорости перемещения и мгновенная скорость пути - это одно и то же, поскольку dr = ds. Среднее ускорениеaср - это вектор, определяемый выражением aср = Δv/Δt. Мгновенное ускорение(или просто, ускорение) a - это вектор, определяемый выражением a =dv/dt. Касательное (тангенциальное) ускорение aτ (нижний индекс - это греческая строчная буква тау) - это вектор, являющийсявекторной проекцией мгновенного ускорения на касательную ось. Нормальное (центростремительное) ускорение an - это вектор, являющийсявекторной проекцией мгновенного ускорения на ось нормали. Модуль касательного ускорения | aτ | = dv/dt, то есть это - производная модуля мгновенной скорости по времени. Модуль нормального ускорения | an | = v2/r, где r - величина радиуса кривизны траектории в точке нахождения тела. Важно! Хочу обратить внимание на следующее. Не путайтесь с обозначениями, касающимися касательного и нормального ускорений! Дело в том, что в литературе по этому поводу традиционно наблюдается полная чехарда. Запомните! aτ - это вектор касательного ускорения, an - это вектор нормального ускорения. aτ и an являются векторными проекциями полного ускорения а на касательную ось и ось нормали соответственно, aτ - это проекция (скалярная!) касательного ускорения на касательную ось, an - это проекция (скалярная!) нормального ускорения на ось нормали, | aτ |- это модульвектора касательного ускорения, | an | - это модульвектора нормального ускорения. Не зная азов векторной алгебры или пренебрегая ими, очень легко полностью запутаться при изучении и анализе физических процессов. Поэтому знание векторной алгебры является наиглавнейшим условием успеха в изучении механики. И не только механики. В дальнейшем, при изучении других разделов физики, Вы неоднократно в этом убедитесь. Мгновенная угловая скорость(или просто, угловая скорость) ω- это вектор, определяемый выражением ω = dφ/dt, где dφ- бесконечно малое изменение угловой координаты (dφ- вектор!). Мгновенное угловое ускорение(или просто, угловое ускорение) ε- это вектор, определяемый выражением ε= dω/dt. Связь между v, ω и r: v =ω ×r. Связь между v, ω и r: v = ω · r. Связь между | aτ |, ε и r: | aτ | = ε · r. Теперь перейдем ккинематическим уравнениям конкретных видов движения. Эти уравнения надо выучить наизусть. Кинематическое уравнение равномерного и прямолинейного движенияимеет вид: r = r0 + v t, гдеr- радиус-вектор объекта в момент времени t, r0 - то же в начальный момент времени t0 (в момент начала наблюдений). Кинематическое уравнение движения с постоянным ускорениемимеет вид: r = r0 + v0 t + at2/2, где v0 скорость объекта в момент t0 . Уравнение для скорости тела при движении с постоянным ускорениемимеет вид: v= v0 + a t. Кинематическое уравнение равномерного движения по окружности в полярных координатахимеет вид: φ = φ0 + ωz t, где φ - угловая координата тела в данный момент времени, φ0 - угловая координата тела в момент начала наблюдения (в начальный момент времени), ωz - проекция угловой скорости ωна ось Z (обычно эта ось выбирается перпендикулярно плоскости вращения). |