| ПОЗНАВАТЕЛЬНОЕ Сила воли ведет к действию, а позитивные действия формируют позитивное отношение Как определить диапазон голоса - ваш вокал Игровые автоматы с быстрым выводом Как самому избавиться от обидчивости Противоречивые взгляды на качества, присущие мужчинам Вкуснейший "Салат из свеклы с чесноком" Натюрморт и его изобразительные возможности Применение, как принимать мумие? Мумие для волос, лица, при переломах, при кровотечении и т.д. Как научиться брать на себя ответственность Зачем нужны границы в отношениях с детьми? Световозвращающие элементы на детской одежде Как победить свой возраст? Восемь уникальных способов, которые помогут достичь долголетия Классификация ожирения по ИМТ (ВОЗ) Глава 3. Завет мужчины с женщиной
Оси и плоскости тела человека - Тело человека состоит из определенных топографических частей и участков, в которых расположены органы, мышцы, сосуды, нервы и т.д.
| Системы автоматического контроля
ОСНОВЫ АВТОМАТИКИ И АВТОМАТИЗАЦИИ
Учебное пособие
ч.2 Автоматические системы.
Санкт-Петербург 2011 УДК 658.011.56
Е.П. Дудкин, Г.И. Коропальцев, А.А. Зайцев, К.О. Ерохов
Основы автоматики и автоматизации: Учебное пособие. Часть 2: Автоматические системы – Спб.: Петербургский государственный университет путей сообщения, 2011. – 45 с. Данное учебное пособие является продолжением предыдущего и в нем рассматриваются основные разновидности автоматических систем, применяемых в строительстве и путевом хозяйстве. Подробно изложены принципы их построения, состав и структура автоматических систем. Приведены принципиальные электрические схемы некоторых систем, рассмотрена их работа и особенности применения. Кроме этого, приведены конкретные примеры некоторых схем автоматических систем, применяемых в строительном производстве, с подробным описанием их назначения, состава и принципа действия. Предназначено для студентов заочной формы обучения, изучающих дисциплину «Основы автоматики и автоматизации», и может быть рекомендовано для студентов вечернего факультета, а также для слушателей курсов повышения квалификации по строительным специальностям.
Системы автоматического контроля Системы автоматического контроля (САК)предназначены для автоматического контроля различных технологических параметров на производственном объекте (объекте автоматизации) и, в конечном счёте, для непосредственного измерения и регистрации этих параметров. Поэтому их часто называют измерительными системами.Исключение составляют системы контроля дискретного типа, в которых выходная величина может принимать только два (0 – 1) или несколько фиксированных значений. Структура измерительных систем включает в себя сам объект автоматизации ОА (объект контроля), измерительное устройство ИУ и регистрирующее устройство РУ для конечной фиксации или записи измеренного параметра при его изменении в течение определённого промежутка времени (рис.5.1).
Рис.5.1. Структурная схема системы автоматического контроля
В зависимости от вида измерительного устройства автоматические измерительные системы делятся на две большие группы: 1. Небалансные (некомпенсационные, неуравновешенные) системы; 2. Балансные (компенсационные, уравновешенные) системы. Небалансные системы – это системы прямого измерения. Они просты по своей структуре и конструкции, но имеют существенный недостаток, т.к. обладают погрешностью измерения, возникающей под действием различных внешних условий, таких как, изменение окружающей температуры, нестабильность величины напряжения источника питания, а также погрешностью, обусловленной изменением внутренних параметров входящих в систему элементов. Структурно измерительные устройства таких систем состоят из датчика Д, преобразующего неэлектрическую величину в электрический сигнал, измерительной схемы ИС и, как правило, усилителя У (рис.5.2), т.е. представляют собой последовательное соединение нескольких элементов, изменение, по какой-либо причине, выходного параметра одного из них сказывается на изменении результирующей выходной величины.
Рис.5.2. Структурная схема измерительного устройства (системы прямого измерения)
Балансные системы – основаны на автоматическом уравновешивании (балансировании) выходной величины датчика, поступающей на измерительную схему, с помощью равной ей величины такого же рода, пропорциональной изменению выходной величины датчика х1. На рис.5.3 представлена структурная схема измерительной системы непрерывного балансирования, чаще всего используемая на практике. В таких системах, как видно из схемы, имеется жесткая обратная связь, т.е. такие системы – замкнутые, и в них вводятся дополнительные звенья, значительно усложняющие структуру в целом.
Рис.5.3. Структурная схема балансной измерительной системы В этой схеме используется, прежде всего, элемент сравнения ЭС, выполняющий функции «нуль-органа» и работающий на установление нулевого выходного сигнала ∆х=0, поступающего на вход усилителя У. В качестве нуль-органа в балансных системах используются уравновешенные измерительные схемы, такие, как мостовые, дифференциальные или компенсационные (см. ч.1 Схемы включения датчиков). Другое дополнительное звено балансирующий орган Б, который своей выходной величиной соответствующим образом воздействует на элемент сравнения. В качестве этого элемента обычно используется электродвигатель с редуктором, который по цепи обратной связи, как правило, механической, уравновешивает применяемую измерительную схему, устанавливая, таким образом, на ее выходе нулевой сигнал. При выполнении условия Dх=0 выходной сигнал усилителя также отсутствует (хУ=0). При этом балансирующий орган не работает, не оказывая никакого воздействия на элемент сравнения, и вся система находится в состоянии покоя. Малейшее изменение измеряемого параметра хвх вызывает на выходе элемента сравнения появление сигнала рассогласования ∆x, отличного от нуля, причем определенной полярности или фазы. Этот сигнал, увеличенный количественно с помощью усилителя, поступает на обмотку управления используемого электродвигателя. При этом двигатель приходит в движение и, в соответствии со знаком (или фазой) управляющего сигнала ху, через редуктор перемещает движок регулирующего элемента измерительной схемы в требуемом направлении, уравновешивая ее снова, т.е. добиваясь равенства нулю выходного сигнала измерительной схемы, а следовательно и ху , при котором двигатель вновь останавливается до следующего изменения измеряемого параметра.
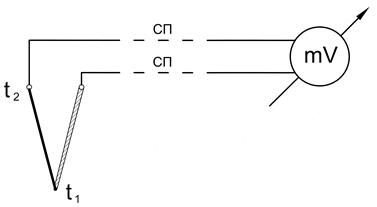
Выходной величиной подобных балансных измерительных систем является угловое перемещение выходного вала редуктора и угловое (или линейное) перемещение механически связанного с ним движка переменного резистора (реохорда), а в некоторых случаях (при дифференциальной схеме включения датчика) положение движка измерительного трансформатора, уравновешивающих соответствующую измерительную схему. Поэтому подобные регулирующие элементы всегда оснащаются специальной измерительной шкалой, проградуированной в единицах измеряемого параметра, по которой и определяется величина контролируемого параметра хвх . Как видим, подобные измерительные системы более сложные и по структуре они подобны системам автоматического регулирования – САР (см. далее), но в них исключаются многие погрешности, свойственные небалансным системам, и, кроме этого, обеспечивается большая мощность выходного сигнала. По виду балансируемой величины балансные измерительные системы в зависимости от используемых датчиков и схем их включения подразделяются на автоматические потенциометры, уравновешивающие выходное напряжение датчика, и автоматические мосты, уравновешивающие выходное сопротивление датчика. Далее рассмотрим на конкретных примерах некоторые измерительные системы, остановимся на их работе, на положительных и отрицательных свойствах этих систем, а также на причинах возникновения погрешностей измерения и методах их компенсации. Так простейший измеритель температуры – пирометр (рис.5.4) состоит из датчика генераторного типа – термопары, измерительного милливольтметра и двух соединительных проводов СП, длина которых в большинстве случаев может достигать значительной величины, из-за удалённости самого объекта контроля от пункта наблюдения. В этой схеме, под действием возникающей в датчике термо-э.д.с., в зависимости от измеряемой температуры, по соединительным проводам будет протекать ток, под действием которого на каждом из этих проводов будет наблюдаться падение напряжения, пропорциональное величине тока и внутреннему сопротивлению проводов. Поэтому величина напряжения на самом милливольтметре соответственно уменьшится, что приведёт, тем самым, к появлению погрешности измерения. Причём, сопротивление соединительных проводов зависит от их длины и может также изменяться от окружающих температурных условий. В результате возникающая погрешность ещё больше может возрасти. Таким образом, несмотря на простоту рассмотренной измерительной системы (пирометра), она всегда имеет достаточно высокую погрешность измерения.
Рис.5.4. Принципиальная электрическая схема пирометра
В качестве другого примера рассмотрим измерительную систему с применением мостовой схемы, в которую включен тензочувствительный датчик сопротивления (рис.5.5) и предназначенную для измерения деформаций строительных конструкций.



Рис.5.5. Конструктивная и электрическая схема измерителя деформаций
В этой измерительной системе используется схема неравновесного моста, в котором в качестве резистора R1 (рис.5.5.б), подключён проволочный датчик сопротивления 2 (тензодатчик), прикрепленный (тщательно приклеенный) к исследуемой детали (конструкции) 1 (рис.5.5.а) и воспринимающий деформацию этой детали при воздействии на неё механических усилий F. Для увеличения чувствительности рассматриваемой измерительной системы в ней дополнительно используется усилитель 4, вход которого подключен к измерительной диагонали моста с-d, а усиленный им сигнал поступает затем на регистрирующий прибор 5, по шкале которого и фиксируется контролируемый параметр Рассматриваемая схема может быть использована не только для измерения деформаций различных конструкций или их отдельных элементов, но также она позволяет определять величины действующих усилий F , а также механических напряжений, возникающих в результате деформации. Погрешность измерения рассмотренной системы обусловлена несколькими причинами. Прежде всего, в ней имеет место температурная составляющая погрешности, вызванная тем, что, во-первых, возможна дополнительная деформация конструкции, на которой закреплен тензодатчик, из-за изменения окружающей температуры и, во-вторых, сам тензодатчик может работать как термосопротивление, т.е. его сопротивление от температуры тоже может изменяться. Для компенсации температурной погрешности, в подобных случаях, необходимо на исследуемой конструкции рядом с рабочим тензодатчиком установить ещё один, точно такой же, датчик 3 (рис.5.5.а), включив его в смежное плечо мостовой схемы (например, в качестве резистора - R3).. Однако располагать этот датчик на детали необходимо так, чтобы он не воспринимал её деформацию от нагрузки, т.е. перпендикулярно рабочему датчику R1. В результате, оба датчика будут находиться в одинаковых температурных условиях, и в уравнении равновесия мостовой схемы при изменении температуры будут одинаково изменяться и правая и левая части равенства (см. ч.1 «Схемы включения датчиков»). При этом равновесие моста не нарушится, а деформацию конструкции от нагрузки будет воспринимать только рабочий датчик R1 . Однако в подобной измерительной системе кроме температурной погрешности может иметь место погрешность за счет изменения напряжения источника питания U , т.к. величина сигнала, поступающего на усилитель и, в конечном счете, показание измерительного прибора пропорциональны величине этого напряжения. Для компенсации такой составляющей погрешности необходимо применять стабилизированный источник питания мостовой схемы. Если такой возможности нет, то в качестве измерительного прибора следует использовать логометр. Логометр - это электродинамическая измерительная система, в которой вместо одной используются две жестко соединённые между собой под определенным углом подвижные катушки. Поэтому угол их поворота и результирующее отклонение стрелки (показание измерительного прибора) пропорционально не величине протекающего по этим катушкам тока, а зависит только от соотношения токов, протекающих по каждой катушке отдельно. Так на рис.5.6 представлена схема измерителя температуры с использованием в качестве регистрирующего прибора логометра. Здесь в качестве температурного датчика применяется термосопротивление Rt , включенное также в неравновесную мостовую схему, а к измерительной диагонали моста c-d подключена одна из подвижных катушек логометра. Вторая катушка логометра подключена к тому же источнику питания через дополнительный резистор R3 . При этом величины токов I1 и I2 в зависимости от значения напряжения питания U будут изменяться одинаково, и соотношение этих токов будет оставаться неизменным. Но в этой системе имеет место погрешность измерения, обусловленная наличием соединительных проводов, идущих от мостовой схемы к датчику, и длина которых также может быть значительной из-за удаленности объекта контроля от пункта наблюдения. Величина сопротивления этих двух проводов Rсп является ненужной составляющей к термосопротивлению, и она может также изменяться от окружающих условий. Для исключения этой составляющей погрешности измерения, в большинстве случаев, как правило, вместо двухпроводной цепи используют трехпроводную схему подключения датчика. На рис.5.6 третий провод показан жирной пунктирной линией, а провод, идущий к точке а, - обрывается. При этом точка питания «а» смещается вниз (по схеме) - к термодатчику Rt. ( точка ά)
Рис.5.6. Принципиальная электрическая схема измерителя температуры с логометром
При трехроводной схеме включения датчиков, кроме сказанного, компенсируется и величина электромагнитных наводок от внешних магнитных полей на длинные соединительные провода. В рассмотренных измерительных системах, являющихся системами прямого измерения (небалансными), все погрешности скомпенсировать невозможно, особенно такие, которые обусловлены изменением внутренних параметров самих элементов, составляющих систему в целом. Например изменение коэффициента усиления усилителя по различным причинам, как в схеме на рис.5.5, и даже наличие чисто субъективной погрешности измерения. Для исключения перечисленных погрешностей и были разработаны балансные измерительные системы. Так на рис.5.7 представлена схема автоматического моста для измерения температуры. В рассматриваемой системе датчиком также является термосопротивление Rt , включенное здесь в схему равновесного моста, запитанного от сети переменного тока. В схеме также используется трёхпроводная схема подключения датчика. Сигнал с равновесной мостовой схемы поступает на вход электронного усилителя ЭУ, нагрузкой которого служит обмотка управления асинхронного электродвигателя АД с редуктором. Двигатель работает в режиме управляемого электропривода (см. ч.1, рис. 5.1), и выходной вал редуктора жестко связан с движком реохорда R, включенного в схему равновесного моста. Обмотка возбуждения асинхронного двигателя через фазосдвигающую емкость С также запитана от сети переменного тока, чтобы получить вращающееся магнитное поле, создаваемое его статорными обмотками.
Рис.5.7. Принципиальная электрическая схема балансной измерительной системы
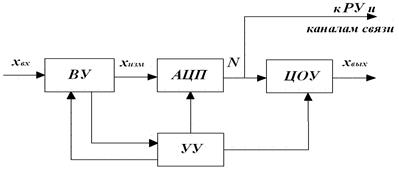
В работе рассматриваемой системы при каждом изменении измеряемого параметра (температуры) равновесие мостовой схемы будет нарушаться, что вызывает появление на входе электронного усилителя сигналарассогласования Рассмотренная система работает в режиме непрерывного балансирования, но, в некоторых случаях, для измерения одновременно нескольких параметров используют системы периодического балансирования, в которых используется один электропривод, поочередно используемый для каждой схемы измерения. В балансных измерительных системах все погрешности, в том числе от изменения внутренних параметров входящих элементов, таких как изменение коэффициента усиления усилителя, исключаются. Единственным недостатком подобных измерительных систем является невозможность их применения для контроля быстроизменяющихся во времени параметров, т.е. для динамических измерений, например, таких, как взаимодействие ж/д пути и подвижного состава. Это связано с использованием в балансных измерительных системах такого инерционного элемента как электродвигатель с редуктором. Поэтому для динамических измерений возможно применение лишь систем прямого измерения (небалансных систем) с соответствующими быстродействующими регистрирующими устройствами. Все рассмотренные выше измерительные системы являются аналоговыми приборами непосредственной оценки. Благодаря современным достижениям в области микроэлектроники и измерительной техники всё большее применение получают цифровые измерительные приборы, т.е. измерительные системы с цифровым отсчетом. Дискретная форма представления результатов измерения более точна и удобна как для визуального наблюдения и регистрации, так и для передачи на расстояние в системах телемеханики и телеизмерений. В цифровых измерительных системах, кроме этого, полностью исключается и субъективная составляющая погрешности. Структура цифровой измерительной системы представлена на рис.5.8, и она состоит из входного устройства ВУ, в состав которого входят датчики с соответствующими схемами их включения и усилителями, аналогово-цифрового преобразователя АЦП, созданного на основе современной микроэлектроники, цифрового отсчетного устройства ЦОУ и устройства управления УУ.
Рис.5.8. Структурная схема цифровой измерительной системы
Входное устройство предназначено для масштабного преобразования (усиления) входной измеряемой величины хвх и, кроме этого, отделения от неё возможных помех. Аналогово-цифровой преобразователь преобразует измеряемую величину хизм в цифровой код N, который поступает на цифровое отсчетное устройство ЦОУ, где измеряемая величина индицируется в виде ряда цифр на соответствующем цифровом табло. Кроме этого, цифровой код N может использоваться для его фиксации на регистрирующем устройстве РУ и для передачи его по каналам связи в системах телеизмерения и телемеханики. Устройство управления, в зависимости от входного сигнала, вырабатывает определенную последовательность командных сигналов во все функциональные узлы цифровой измерительной системы, обеспечивая их четкую и надежную работу. Цифровые измерительные системы обладают, по сравнению с аналоговыми, следующими достоинствами: - высокая точность, - быстродействие, - помехоустойчивость, - минимально потребляемая энергия от объекта измерения (с датчиков), - удобство визуального отсчета, - возможность выдачи результатов измерения (в виде кода) в различные внешние устройства, обеспечивающие автоматизацию процессов измерения и управления. К недостаткам подобных систем следует отнести сравнительную сложность, что обуславливает их более высокую стоимость и, в некоторых случаях, относительно невысокую надежность. К сожалению, ограниченный объем настоящего учебного пособия и программа изучаемой дисциплины не позволяют более подробно на них останавливаться.
|









 При этом в уравнение равновесия мостовой схемы величина сопротивлений каждого из двух соединительных проводов, идущих от мостовой схемы к термосопротивлению, входит в состав сопротивлений смежных сторон мостовой схемы, и их изменение за счет длины и воздействия окружающей температуры не нарушает равновесия мостовой схемы. Влияние величины сопротивления третьего провода, по которому, в данном случае, подается питание к мостовой схеме, сказывается лишь на уменьшении величины напряжения питания на ней, но это изменение скомпенсировано применением в качестве измерительного прибора логометра.
При этом в уравнение равновесия мостовой схемы величина сопротивлений каждого из двух соединительных проводов, идущих от мостовой схемы к термосопротивлению, входит в состав сопротивлений смежных сторон мостовой схемы, и их изменение за счет длины и воздействия окружающей температуры не нарушает равновесия мостовой схемы. Влияние величины сопротивления третьего провода, по которому, в данном случае, подается питание к мостовой схеме, сказывается лишь на уменьшении величины напряжения питания на ней, но это изменение скомпенсировано применением в качестве измерительного прибора логометра.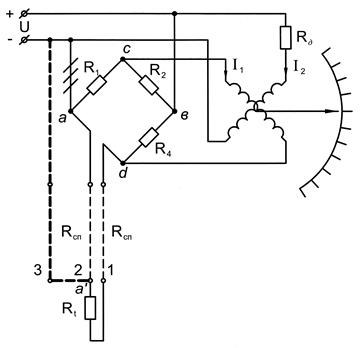
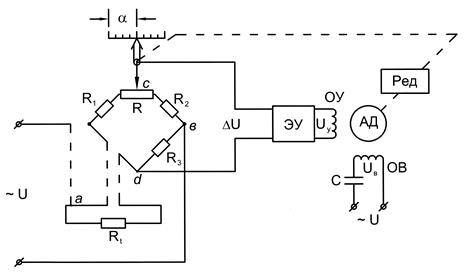
 U, причем соответствующей фазы. В результате на выходе усилителя и на обмотке управления электродвигателя появляется напряжение управления Uy , и двигатель приходит в движение. Через редуктор он перемещает движок реохорда в требуемом направлении, в соответствии с фазой сигнала рассогласования и величиной напряжения управления, до тех пор, пока сигнал рассогласования не станет равным нулю, т.е. мостовая схема вновь уравновесится, а двигатель при этом остановится. При этом, по шкале реохорда, заранее проградуированной в единицах температуры (градусах), можно определить текущее значение температуры на объекте контроля.
U, причем соответствующей фазы. В результате на выходе усилителя и на обмотке управления электродвигателя появляется напряжение управления Uy , и двигатель приходит в движение. Через редуктор он перемещает движок реохорда в требуемом направлении, в соответствии с фазой сигнала рассогласования и величиной напряжения управления, до тех пор, пока сигнал рассогласования не станет равным нулю, т.е. мостовая схема вновь уравновесится, а двигатель при этом остановится. При этом, по шкале реохорда, заранее проградуированной в единицах температуры (градусах), можно определить текущее значение температуры на объекте контроля.