| ПОЗНАВАТЕЛЬНОЕ Сила воли ведет к действию, а позитивные действия формируют позитивное отношение Как определить диапазон голоса - ваш вокал Игровые автоматы с быстрым выводом Как самому избавиться от обидчивости Противоречивые взгляды на качества, присущие мужчинам Вкуснейший "Салат из свеклы с чесноком" Натюрморт и его изобразительные возможности Применение, как принимать мумие? Мумие для волос, лица, при переломах, при кровотечении и т.д. Как научиться брать на себя ответственность Зачем нужны границы в отношениях с детьми? Световозвращающие элементы на детской одежде Как победить свой возраст? Восемь уникальных способов, которые помогут достичь долголетия Классификация ожирения по ИМТ (ВОЗ) Глава 3. Завет мужчины с женщиной
Оси и плоскости тела человека - Тело человека состоит из определенных топографических частей и участков, в которых расположены органы, мышцы, сосуды, нервы и т.д.
| Системы автоматического управления
И регулирования 8.1 Системы автоматического управления (САУ) САУ предназначены для решения основной задачи управления – достиженияопределённой цели. При этом весь процесс управления сводится к трем основным действиям: 1. - Получение информации о состоянии объекта управления (объекта автоматизации). При этом информация должна поступать непрерывно и с достаточно высокой точностью. 2. - Переработка этой информации для принятия решения на соответствующее управление объектом автоматизации, в зависимости от его состояния на данный момент времени. 3. - Передача информации в виде сигнала управления на объект автоматизации, чтобы осуществить на него необходимое определённое воздействие.
На рис.8.1 представлена обобщённая структура взаимосвязи САУ и объекта автоматизации, работа которого характеризуется, прежде всего, его выходными параметрами – хвых..
Рис.8.1. Структурная схема взаимосвязи объекта автоматизации и системы автоматического управления Здесь хвх - входная величина, представляющая собой требуемоеуправляющее воздействие, с помощью которого должна достигаться основная цель управления. При этом на объект автоматизации всегда может действовать какое-либо возмущающее воздействие - zв , изменяющее выходные параметры объекта.Следует заметить, что природа подобных воздействий часто зависит и от характера самого объекта автоматизации, а они могут быть как полезными, так и вредными. Поэтому система автоматического управления, в зависимости от входной величины и с учетом возмущающих воздействий, должна вырабатывать соответствующий сигнал управления – ху, закон изменения которого получил название алгоритм управления. В теории САУ различают два класса алгоритма управления: - детерминированный, т.е. наперед заданный определённой последовательностью и соответствующей программой алгоритм; - информационный, т.е. переменный алгоритм управления в зависимости от окружающих условий работы объекта автоматизации. Этот класс более сложный и, очень часто используется совместно с электронными вычислительными машинами (ЭВМ).
Все системы автоматического управления делятся на следующие классификационные группы: 1. Системы оптимальные по быстродействию, в которых управление объектом осуществляется за минимально возможное время. 2. Системы программного управления, осуществляющие управление по заранее составленной определённой программе. При этом требуемая программа, чаще всего в настоящее время, задается в цифровом виде с помощью специального задающего устройства 3. Экстремальные системы, в которых управляемые параметры объекта выводятся на максимальные или минимальные значения и там удерживаются. В такие системы включается специальное устройство, которое определяет отклонение регулируемого параметра от экстремального значения и формирует в связи с этим соответствующий сигнал управления 4. Функциональные системы. В них управление объектом автоматизации осуществляется только при выполнении определённых, заранее заданных, функциональных зависимостей или предварительных расчётов.
Системы автоматического управления в зависимости от их структуры могут быть, прежде всего, разомкнутые,в которых нет контроля выходных параметров объекта автоматизации. В таких системах отсутствует обратная связь (ОС). Но в настоящее время наиболее широко применяются замкнутые системы автоматического управления. В замкнутых системах автоматического управления осуществляется непрерывный контроль выходных параметров объекта автоматизации. Для этого в такие системы вводится обратная связь, представляющая собой, чаще всего, измерительную систему, т.е. систему контроля, которая по своей структуре может быть, в некоторых случаях, сложнее самой системы управления. Но при этом в замкнутых системах исключается влияние многих возмущающих воздействий, действующих на объект автоматизации. Наибольшее применение системы автоматического управления получили для автоматизации работы силовых и тяговых электродвигателей на транспорте, в строительстве и разного вида электромеханических и электромагнитных исполнительных устройств. Подобные системы были рассмотрены в разделе «Электроприводы». Широко применяются системы автоматического управления в строительно-дорожных машинах с гидравлическим силовым приводом, некоторым из которых посвящен последний раздел настоящего учебного пособия
.Следует заметить, что структура систем автоматического регулирования, которым уделено внимание в следующем подразделе, подобна структуре систем управления. Для расчета и тех и других используется один и тот же математический аппарат и аналогичные методы исследования, но отличие этих систем друг от друга можно проследить на следующем графике (рис.8.2).
Рис. 8.2. Сравнительное назначение и отличие САУ и САР
Допустим, что какой-либо объект необходимо переместить из точки А в точку В. Это перемещение по соответствующей траектории, в зависимости от классификационной группы и выполняет система автоматического управления (САУ). Но после перемещения в точку В необходимо объект в этой точке удержать, и вот это удержание выполняется с помощью системы автоматического регулирования (САР). Из этого следует, что системы автоматического управления более сложные, чем системы автоматического регулирования, так как их работа связана с более значительными перемещениями, как самого объекта, так и диапазона изменения его управляемых (или регулируемых) параметров. Поскольку программа нашей дисциплины посвящена основам автоматики и автоматизации, остановимся в дальнейшем только на рассмотрении структуры систем автоматического регулирования, их устройству и работе применительно к конкретным условиям их применения.
8.2 Системы автоматического регулирования (САР)
Основное назначение САР заключается в поддержании выходных параметров объекта автоматизации на определенном заданном уровне или изменение этих параметров по определенному закону. Как и системы автоматического управления системы регулирования бывают также разомкнутыми и замкнутыми, т.е. с элементами обратной связи и без них. Так в разомкнутых системах регулирования для компенсации вредных возмущающих воздействий, действующих на объект автоматизации, часто используют специальные корректирующие устройства - КУ, подключаемые на вход системы согласно рис.8.3.
хку
Рис. 8.3 Структура САР с корректирующим устройством
Здесь самый первый элемент на входе системы регулирования выполняет функции суммирующего устройства , которое вырабатывает сигнал х1, равный сумме входного сигнала хвх и сигнала, поступающего с корректирующего устройства. С учетом этого возмущающего воздействия и входного сигнала и САР вырабатывает соответствующий сигнал регулирования хр для дальнейшего воздействия на объект регулирования. Но все возмущающие воздействия в разомкнутой системе скомпенсировать не удается. Поэтому большинство современных систем и регулирования и управления структурно строятся, в основном, замкнутыми, т.е. с использованием обратной связи – ОС (рис.8.4).
хос
Рис.8.4. Структурная схема замкнутой САР
С помощью обратной связи в таких системах осуществляется постоянный контроль выходных параметров объекта управления или регулирования и вырабатывается соответствующий сигнал обратной связи хос, поступающийна элемент сравнения, где он непрерывно сравнивается с входной величиной хвх , поступающегос задающего устройства, и вырабатывается разностный сигнал ∆х = хвх – хос и, в соответствии с этим, сигналом хр система регулирования воздействует на объект автоматизации. В некоторых случаях системы автоматического регулирования структурно строятся комбинированными, т.е. с компенсацией ошибок, в которых используются два принципа регулирования - по замкнутому и по разомкнутому циклу регулирования (рис.8.5).
Рис.8.5. Структурная схема комбинированной САР
Но такие системы более сложные, что требует кроме материальных затрат на их изготовление и более дорогое их обслуживание. Так на рис.8.6 представлена наиболее полная структура большинства систем автоматического регулирования и управления с функциональной взаимосвязью всех элементов, составляющих эти системы. Подобная, достаточно сложная, структура таких систем используется, чтобы обеспечить их устойчивость и более высокие показатели качества при эксплуатации.
РРис.8.6. Структурная схема систем автоматического управления и регулирования ЗУ – задающее устройство, с помощью которого устанавливается требуемое значение выходных параметров на объекте автоматизации ОА (управления или регулирования). КУ1 – корректирующее устройство для компенсации возмущающего воздействия zв на объект автоматизации. ИЭ – исполнительный элемент, оказывающий непосредственное воздействие на объект автоматизации. ГОС – главная обратная связь, с помощью которой осуществляется постоянный контроль выходных параметров объекта автоматизации хвых. У – усилитель, предназначенный для усиления сигнала х2.. МОС – местная обратная связь (параллельное корректирующее устройство) для улучшения качества используемого в системе усилителя. КУ2 – последовательное корректирующее устройство для дополнительной обработки сигнала ошибки ∆х.
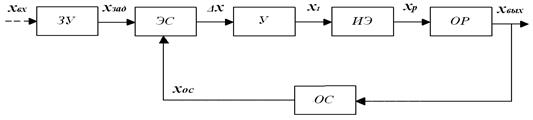
Однако, при дальнейшем рассмотрении систем автоматического регулирования (а также управления) за их основу примем более общую (ключевую) структурную схему (рис.8.7), составленную только из основных функциональных узлов, таких как: задающее устройство ЗУ, элемент сравнения ЭС, усилитель У, если он необходим,исполнительный элемент ИЭ и элемент обратной связи ОС.
Рис.8.7. Структурная схема системы автоматического управления и регулирования, представленная только основными элементами.
В зависимости от назначения и работы все системы автоматического регулирования делятся на следующие три основные классификационные группы:
1. Системы автоматической стабилизации, в которых выходная величина на объекте автоматизации поддерживается постоянной. 2.Системы программного регулирования. В таких системах выходные параметры объекта автоматизации изменяются по заранее составленной программе. При этом сама программа может задаваться либо с помощью специальных копиров или чертежей, либо, чаще всего, в цифровом виде с использованием современных носителей информации. 3.Следящие системы, в которых закон изменения входной величины хвх, поступающей на вход задающего устройства, заранее неизвестен и может в процессе работы непрерывно изменяться в зависимости от окружающих условий. Но при этом система регулирования должна следить за этими изменениями и в соответствии с ними регулировать выходные параметры объекта автоматизации.
Перечисленная классификация систем автоматического регулирования, в конечном счёте, определяется характером задающего устройства, используемого в системе. Так в системах автоматической стабилизации задающее устройство вырабатывает постоянный по величине сигнал (хзад = const ). В системах программного регулирования сигнал с задающего устройства изменяется ( х зад = var ), но по заранее составленной определенной программе. В следящих системах величина заданного сигнала зависит от неизвестного по величине входного воздействия, поступающего на вход задающего устройства. А система регулирования, в результате, определяет это воздействие (т.е. отслеживает его) и вырабатывает соответствующий сигнал регулирования - хр в соответствии с законом изменения этого входного воздействия.
|