| ПОЗНАВАТЕЛЬНОЕ Сила воли ведет к действию, а позитивные действия формируют позитивное отношение Как определить диапазон голоса - ваш вокал Игровые автоматы с быстрым выводом Как самому избавиться от обидчивости Противоречивые взгляды на качества, присущие мужчинам Вкуснейший "Салат из свеклы с чесноком" Натюрморт и его изобразительные возможности Применение, как принимать мумие? Мумие для волос, лица, при переломах, при кровотечении и т.д. Как научиться брать на себя ответственность Зачем нужны границы в отношениях с детьми? Световозвращающие элементы на детской одежде Как победить свой возраст? Восемь уникальных способов, которые помогут достичь долголетия Классификация ожирения по ИМТ (ВОЗ) Глава 3. Завет мужчины с женщиной
Оси и плоскости тела человека - Тело человека состоит из определенных топографических частей и участков, в которых расположены органы, мышцы, сосуды, нервы и т.д.
| Системы автоматической защиты
Системы автоматической защиты(САЗ), предназначенные для защиты машин и механизмов, а также человека, участвующего в производственном процессе, могут строиться по двум основным направлениям. Во-первых, эти системы должны обеспечивать бесперебойную и надежную работу всех машин, механизмов и другого используемого в производственном процессе оборудования. При возникновении возможных отклонений от нормального режима работы система защиты должна через устройства сигнализации оповещать обслуживающий персонал об этих изменениях для принятия соответствующих мер по их устранению. Во-вторых, системы автоматической защиты должны быть направлены на обеспечение безопасности выполнения работ при несоблюдении или нарушении рабочим персоналом правил техники безопасности. В этих случаях система автоматики обязана либо полностью останавливать весь производственный процесс, либо тот его участок, где произошло это нарушение. Для выполнения всего перечисленного необходимо постоянно контролировать все основные технологические параметры производственного процесса. Поэтому структура систем автоматической защиты аналогична рассмотренным ранее измерительным системам, т.е. САК, и в её состав (рис.6.1) также входят датчик с измерительной схемой и усилителем, но выходной сигнал х3 с него поступает на исполнительный элемент ИЭ. С помощью исполнительного элемента сигналом хвых осуществляется либо включение необходимой сигнализации о чрезмерном превышении контролируемого параметра, либо производственный процесс полностью останавливается (или его отдельный участок), как правило, с помощью отключения системы электроснабжения к объекту автоматизации.
Рис.6.1. Структурная схема системы автоматической защиты
В качестве исполнительных элементов в системах защиты могут использоваться, прежде всего, различные конечные выключатели и ограничители, многие виды реле и электромагнитов, некоторые модификации маломощных электродвигателей и, наконец, современные разработки полупроводниковых устройств, с помощью которых осуществляется остановка производственного процесса и обеспечивается требуемая безопасность проведения тех или иных работ. В соответствии с этим системы автоматической защиты подразделяются на две основные группы: · Системы, обеспечивающие предотвращение аварий машин, механизмов и устройств, используемых при проведении строительных и других работ. · Системы, обеспечивающие безопасность человека и предотвращающие нежелательные последствия нарушений правил техники безопасности при проведении этих работ, в случае возникновения экстренных ситуаций. Например, в аппаратуре управления электроприводом (см. следующий раздел «Электроприводы») широко используются для защиты электродвигателей при их пуске и от перегрузок специальные тепловые токовые реле. С другой стороны, для защиты обслуживающего персонала от поражения электрическим током применяются соответствующие схемы включения работающего электрооборудования, позволяющие полностью отключать его от систем электроснабжения. Следует заметить, что на рис.6.1 представлена структура системы автоматической защиты с использованием в качестве измерительной системы небалансную систему прямого измерения, что, конечно не исключает применения для этих целей более сложных балансных измерительных систем, но это зависит от конкретных целей и условий. Электроприводы Электроприводом называется электромеханическое устройство, состоящее из преобразователя, электродвигателя, механической передачи и аппаратуры управления и предназначенное для электрификации и автоматизации необходимых рабочих процессов. Основное применение электропривода на железнодорожном транспорте это: 1 – тяговый электропривод электровозов, тепловозов, секций пригородных электропоездов, а также поездов метро и многих видов существующего и перспективного городского электротранспорта, 2 – электропривод транспортных и строительно-дорожных машин, канатных дорог, конвейерных линий и экскалаторов, подъемных кранов и механизмов, а также путейского инструмента и приспособлений, 3 – электропривод автоматических стрелок, шлагбаумов, защитных заграждений и т.п.
Основные преимущества электропривода: - простота в устройстве и в управлении, - обеспечение широкого диапазона выходной мощности, - надежность в эксплуатации, - возможность полной автоматизации работы электропривода.
На рисунке 7.1 представлена структура электропривода.
Рисунок 7.1 Структурная схема электропривода
Пр – преобразователь для преобразования параметров источника питания, ЭД – электродвигатель, выполняющий функцию силового агрегата, МП – механическая передача (трансмиссия), связывающая двигатель с исполнительным механизмом ИМ, ИМ – исполнительный механизм на объекте автоматизации, АУ – аппаратура управления электроприводом. Основное назначение перечисленных составляющих электропривода следующее: Преобразователь предназначен для согласования используемого в электроприводе электродвигателя с источником питания по роду тока (постоянный / переменный) и по величине напряжения. Электродвигатель осуществляет преобразование электрической энергии в энергию механическую для дальнейшего воздействия через трансмиссию на соответствующий исполнительный механизм. Механическая передача (трансмиссия) необходима для передачи необходимого по величине крутящего момента и угловой скорости от электродвигателя на исполнительный механизм, в соответствии с его исполнением и конструкцией. Исполнительный механизм – устройство, выполняющее непосредственную работу на данном предприятии, участке или отдельном объекте в соответствии с технологией производства. Аппаратура управления предназначена для управления работой электропривода и его автоматизации. Она должна обеспечивать оптимальный режим пуска и остановки электродвигателя, защиту его от перегрузки и, кроме этого, может, в случае необходимости, управлять работой преобразователя питания и изменять параметры механической передачи (трансмиссии) в необходимых пределах. Дальнейшее рассмотрение сосредоточим именно на аппаратуре управления электроприводом, поскольку её состав и устройство определяет уровень автоматизации работы электропривода.
В зависимости от уровня автоматизации электропривод делится на три основных вида:
1 - неавтоматизированный электропривод, в котором управление его работой выполняется вручную оператором путем воздействия на различные аппараты и приспособления, например, электропривод обычного станка или путейского инструмента;
2 - автоматизированный электропривод, когда человеком задается только начальная команда на его пуск, а дальнейшая работа электропривода осуществляется в автоматическом режиме, определяемом заранее заданным алгоритмом управления, широко применяемый, например, в лифтовом хозяйстве;
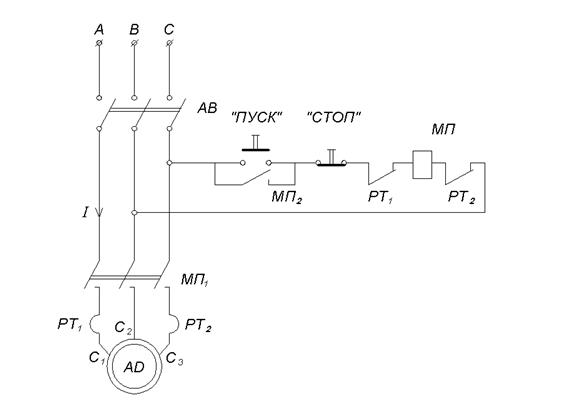
3 - автоматический электропривод, работа которого полностью автоматизирована, а функции человека сводятся только к контролю его нормальной и правильной работы. Примером его является автомашинист в метрополитене. Аппаратура управления включает в себя: - аппараты ручного действия, к которым относятся различные коммутационные элементы и приспособления (выключатели, переключатели, кнопочные посты, контроллеры, реостаты и т.п.); - электромагнитные устройства (реле, контакторы, магнитные пускатели и распределители); - современные полупроводниковые (тринисторные) коммутационные устройства и процессоры, широко используемые в настоящее время вместо электромагнитных устройств; - устройства и приспособления для защиты электропривода от механических перегрузок. В конечном счете, аппаратура управления должна обеспечивать безопасную и надежную работу электропривода, его пуск и экстренную остановку при нештатной ситуации, включение предупредительной аварийной сигнализации и выключение, в случае необходимости, системы электропитания всех устройств электропривода. В электрических схемах аппаратуры управления электроприводом различают две основные электрические цепи: - главная электрическая цепь,предназначенная для передачиэлектрической энергииот источника питания или электросети к электродвигателю; и - цепь управления, осуществляющая связь между источником питания и используемыми в электроприводе устройствами и приспособлениями, обеспечивающими заданную последовательность их работы. Следует заметить, что во всех используемых в аппаратуре управления контактных элементах, имеющих систему замыкающих и размыкающих контактов, за нормальное положение этих контактов принято их положение при обесточенных обмотках электромагнитов и при отсутствии механического воздействия на аппараты ручного действия. При этом все используемые контактные аппараты и устройства оснащены как главными контактами, рассчитанными на большие токи, потребляемые электродвигателями, и они включены в главную электрическую цепь, так и вспомогательными контактами, используемыми только в цепях управления и рассчитанными на значительно меньшую коммутируемую мощность. В качестве примера рассмотрим работу самой простой стандартной принципиальной электрической схемы управления электроприводом, в котором применен асинхронный двигатель с короткозамкнутым ротором (рис.7.2), наиболее часто применяемую в различном станочном оборудовании, в том числе и в путейском электроинструменте. В составе аппаратуры управления используется кнопочный пост, с двумя кнопками «ПУСК» и «СТОП», трёхфазный магнитный пускатель и два токовых реле.
Рисунок 7.2. Принципиальная электрическая схема управления асинхронным электродвигателем
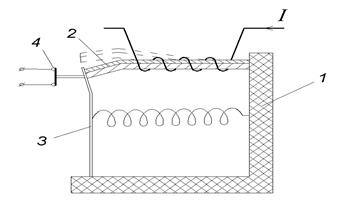
Питание электропривода осуществляется от сети трехфазного переменного тока напряжением 380/220В, при этом в схеме предусмотрена токовая защита электродвигателя от возможных механических перегрузок при его работе. Поэтому в главной электрической цепи кроме автомата-выключателя АВ и главных контактов магнитного пускателя МП в двух фазах питания статорной обмотки асинхронного двигателя АД включены нагревательные элементы двух реле тока РТ1 и РТ2 , предназначенные для контроля величины потребляемого электродвигателем тока. Конструктивно подобные токовые реле представляют собой специальное тепловое реле (рис.7.3), которое состоит из жесткого корпуса 1 с закрепленной на нем биметаллической пластины 2 с нагревательным элементом, обтекаемым током электродвигателя, подвижного подпружиненного штока 3 и связанной с ним нормально замкнутой контактной группы 4, используемой в цепях управления. Аналогичные устройства широко применяются в обычных автоматах-выключателях, используемых в всех современных сетях электроснабжения.
Рисунок 7.3. Устройство теплового реле тока
В цепи управления электроприводом включены: - кнопочный пост, состоящий из нормально разомкнутой кнопки «ПУСК», зашунтированной вспомогательными контактами МП2 магнитного пускателя МП, нормально замкнутой кнопки «СТОП» и обмотки электромагнитного пускателя, - кроме этого, последовательно с ними включены нормально замкнутые контактные группы двух реле тока РТ1 и РТ2 .
Для пуска электропривода необходимо при включенном автомате АВ нажать кнопку «ПУСК» в цепи управления. При этом по обмотке магнитного пускателя будет проходить ток и магнитный пускатель сработает. В результате по цепи главных контактов МП1 трехфазное питание поступает на статорную обмотку асинхронного двигателя (С1 – С3) и двигатель начинает работать, причем вспомогательные контакты магнитного пускателя МП2 шунтируя кнопку «ПУСК», позволяют отпустить эту кнопку. Теперь питание обмотки магнитного пускателя по цепи управления будет осуществляться через эти замкнутые контакты. При необходимости остановки электропривода достаточно кратковременного нажатия на кнопку «СТОП»,при этом цепь питания обмотки магнитного пускателя оказывается разорванной, произойдет его отпускание, при котором разомкнутся все его контакты (и главные и вспомогательные) и двигатель остановится. Причем повторный пуск двигателя возможен только при помощи кнопки «ПУСК». Если при работе электропривода произойдет его механическая перегрузка, а при этом ток, потребляемый двигателем по всем трем фазам, резко возрастает, то биметаллическая пластина 2 (рис.7.3)каждого из двух реле тока при её нагреве увеличившимся током I деформируется (вверх), освобождая собой подпружиненный шток 3. Он под действием пружины смещается вправо и своим движением размыкает нормально замкнутые контакты 4. Причем, срабатывание даже одного из реле тока, контакты которых включены последовательно с обмоткой магнитного пускателя, вызывает размыкание цепи управления, при котором питание обмотки магнитного пускателя также прекращается. Таким образом, контакты двух реле тока, дублируя друг друга, действуют аналогично контактам кнопки «СТОП», при котором обмотка магнитного пускателя также не получает питания и двигатель останавливается. В результате, при механической перегрузке электропривода выполняется автоматическая защита электродвигателя от ненормированного режима работы, что могло привести к выходу его из строя.
При необходимости применения реверсивного (меняющего направление вращения) электропривода используют специальные реверсивные магнитные пускатели или контакторы. В устройстве таких пускателей предусмотрены не один, а два электромагнита и дополнительные силовые и вспомогательные контакты. С помощью вспомогательных контактов осуществляется взаимная блокировка двух обмоток электромагнитов пускателя или контактора для предотвращения их одновременного включения. Кроме этого, вспомогательные (нормально замкнутые) контакты должны иметь кнопки «ПУСК» для каждого направления вращения, которые включаются с ними (взаимно последовательно), чтобы исключить их одновременное нажатие. Изменение направления вращения электропривода, например с асинхронным двигателем, осуществляется с помощью дополнительных силовых контактов, которые изменяют порядок следования фаз трехфазного тока, поступающего к статорным обмоткам. В электроприводах с двигателями постоянного тока изменение направления вращения осуществляется сменой полярности подводимого тока либо к обмоткам возбуждения, либо к якорной цепи используемого электродвигателя. Кроме всего перечисленного, системы управления электроприводом дополнительно могут выполнять, в случае необходимости, функции плавного пуска электродвигателя и уменьшения величины пусковых токов. Методы, с помощью которых это достигается, были рассмотрены при изучении дисциплины «Электротехника» в разделе электрические машины. В заключение, необходимо заметить, что аппаратура управления электроприводами представляет собой разновидность систем автоматического управления, рассмотрению которых посвящен следующий раздел нашего учебного пособия, и эти системы относятся к классификационной группе системы программного управления. |